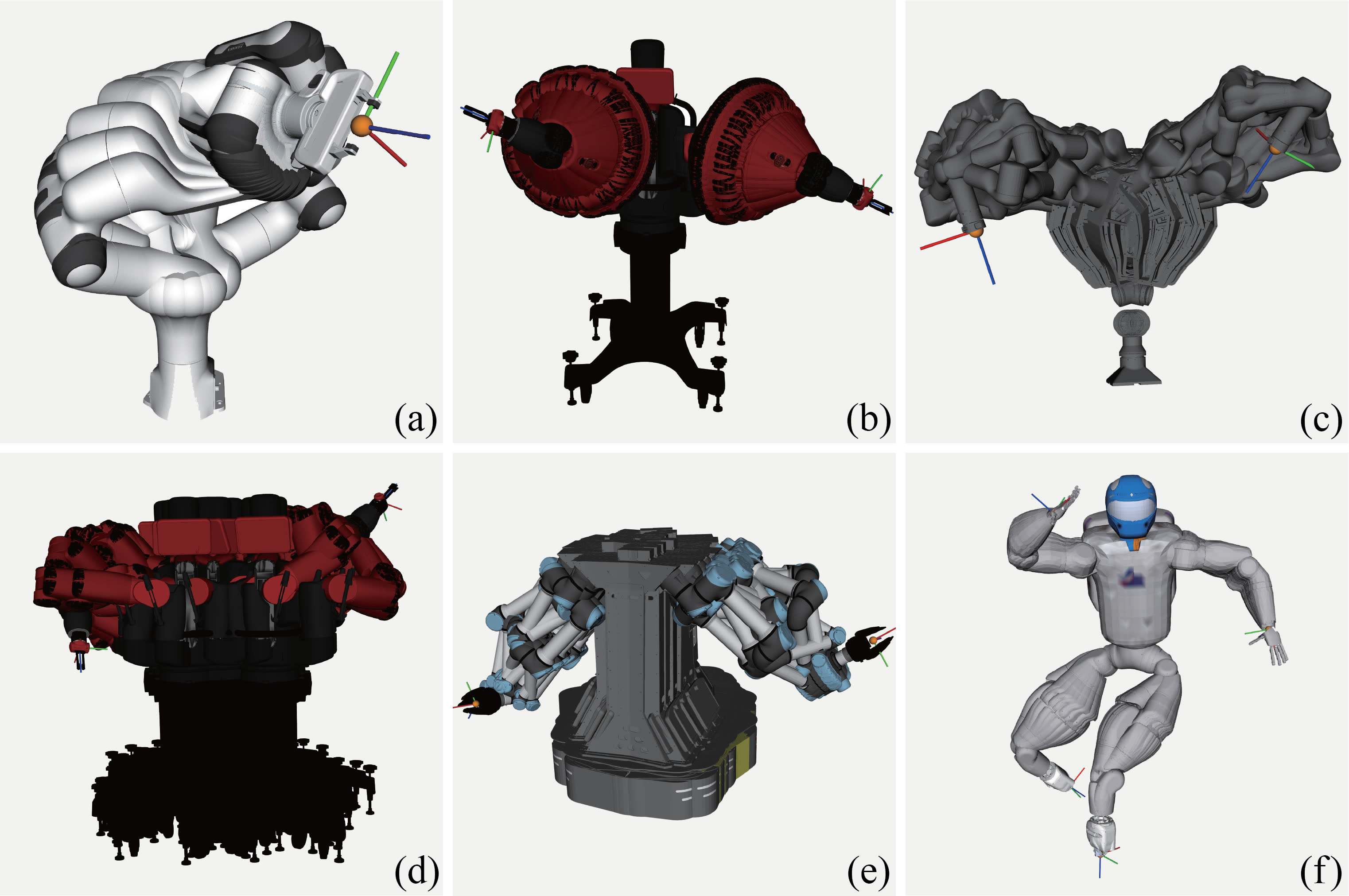
50 IK Solutions generated by IKDiffuser. (a) Franka Research 3; (b) Baxter Dualarm; (c) Dual RealMan-75 with Waist; (d) Mobile Baxter Dualarm; (e) Mobile Dual UR5e; (f) NASA Robonaut.
Abstract
Solving Inverse Kinematics (IK) problems is fundamental to robotics, but has primarily been successful with single serial manipulators. For multi-arm robotic systems, IK remains challenging due to complex self-collisions, coupled joints, and high-dimensional redundancy. These complexities make traditional IK solvers slow, prone to failure, and lacking in solution diversity. In this paper, we present IKDiffuser, a diffusion-based model designed for fast and diverse IK solution generation for multi-arm robotic systems. IKDiffuser learns the joint distribution over the configuration space, capturing complex dependencies and enabling seamless generalization to multi-arm robotic systems of different structures. In addition, IKDiffuser can incorporate additional objectives during inference without retraining, offering versatility and adaptability for task-specific requirements. In experiments on 6 different multi-arm systems, the proposed IKDiffuser achieves superior solution accuracy, precision, diversity, and computational efficiency compared to existing solvers. The proposed IKDiffuser framework offers a scalable, unified approach to solving multi-arm IK problems, facilitating the potential of multi-arm robotic systems in real-time manipulation tasks.
Generating IK solutions via IKDiffuser
Architecture of IKDiffuser. The model generates inverse kinematics solutions $\pmb{q}^0$ by iteratively denoising Gaussian noise $\pmb{q}^T$ over $T$ timesteps, conditioned on target end-effector poses $\mathcal{X}$. Each end-effector pose $\pmb{x}_i$ is embedded with positional encoding (PE), while timestep $t$ is integrated with denoised configuration $\pmb{q}^t$ through a Residual block. The Transformer block employs cross-attention to learn the relation between joint configurations and end-effector poses, with detailed block structures shown in the colored boxes on the right.
BibTex
@misc{zhang2025ikdiffuser,title={IKDiffuser: A Generative Inverse Kinematics Solver for Multi-arm Robots via Diffusion Model},author={Zhang, Zeyu and Jiao, Ziyuan},journal={arXiv preprint arXiv:2506.13087},year={2025},}
Solving Inverse Kinematics (IK) problems is fundamental to robotics, but has primarily been successful with single serial manipulators. For multi-arm robotic systems, IK remains challenging due to complex self-collisions, coupled joints, and high-dimensional redundancy. These complexities make traditional IK solvers slow, prone to failure, and lacking in solution diversity. In this paper, we present IKDiffuser, a diffusion-based model designed for fast and diverse IK solution generation for multi-arm robotic systems. IKDiffuser learns the joint distribution over the configuration space, capturing complex dependencies and enabling seamless generalization to multi-arm robotic systems of different structures. In addition, IKDiffuser can incorporate additional objectives during inference without retraining, offering versatility and adaptability for task-specific requirements. In experiments on 6 different multi-arm systems, the proposed IKDiffuser achieves superior solution accuracy, precision, diversity, and computational efficiency compared to existing solvers. The proposed IKDiffuser framework offers a scalable, unified approach to solving multi-arm IK problems, facilitating the potential of multi-arm robotic systems in real-time manipulation tasks.
@misc{zhang2025ikdiffuser,title={IKDiffuser: A Generative Inverse Kinematics Solver for Multi-arm Robots via Diffusion Model},author={Zhang, Zeyu and Jiao, Ziyuan},journal={arXiv preprint arXiv:2506.13087},year={2025},}